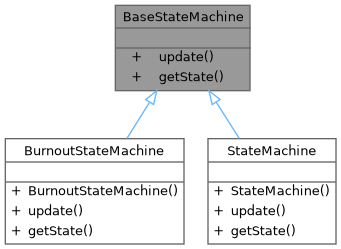
Base class for flight state machines driven by IMU/altimeter data. More...
#include <BaseStateMachine.h>
Public Types | |
| using | StateEntryCallback = void (*)() |
Public Member Functions | |
| BaseStateMachine (FlightState initialState=STATE_UNARMED) | |
| virtual | ~BaseStateMachine ()=default |
| virtual int | update (const AccelerationTriplet &accel, const DataPoint &alt)=0 |
| Advance the state machine with the latest measurements. | |
| virtual uint8_t | getState () const |
| Current discrete state identifier. | |
| bool | registerOnStateEntry (FlightState targetState, StateEntryCallback functionPtr) |
| Register a callback to invoke each time a target state is entered. | |
Static Public Member Functions | |
| static constexpr std::size_t | getMaxStateEntryCallbacks () |
Static Public Attributes | |
| static constexpr std::size_t | kMaxStateEntryCallbacks = 32 |
Protected Member Functions | |
| bool | changeState (FlightState newState) |
| Transition to a new state and trigger registered on-entry callbacks. | |
| FlightState | getFlightState () const |
| Current state as FlightState enum. | |
Detailed Description
Base class for flight state machines driven by IMU/altimeter data.
- Note
- When to use: derive a concrete state machine to map sensor inputs to discrete flight phases without changing call sites. This class owns current-state tracking plus on-entry callback dispatch with no dynamic memory allocation.
Definition at line 19 of file BaseStateMachine.h.
Member Typedef Documentation
◆ StateEntryCallback
| using BaseStateMachine::StateEntryCallback = void (*)() |
Definition at line 22 of file BaseStateMachine.h.
Constructor & Destructor Documentation
◆ BaseStateMachine()
|
explicit |
Definition at line 3 of file BaseStateMachine.cpp.
◆ ~BaseStateMachine()
|
virtualdefault |
Member Function Documentation
◆ changeState()
|
protected |
Transition to a new state and trigger registered on-entry callbacks.
- Parameters
-
newState State to transition into.
- Returns
- true if state changed, false if already in
newState.
Definition at line 33 of file BaseStateMachine.cpp.
◆ getFlightState()
|
protected |
Current state as FlightState enum.
Definition at line 51 of file BaseStateMachine.cpp.
◆ getMaxStateEntryCallbacks()
|
inlinestaticconstexpr |
Definition at line 54 of file BaseStateMachine.h.
◆ getState()
|
virtual |
Current discrete state identifier.
- Note
- When to use: downstream logic (ejection, logging, UI) queries this to decide actions.
Definition at line 5 of file BaseStateMachine.cpp.
◆ registerOnStateEntry()
| bool BaseStateMachine::registerOnStateEntry | ( | FlightState | targetState, |
| StateEntryCallback | functionPtr ) |
Register a callback to invoke each time a target state is entered.
- Parameters
-
targetState The state that triggers the callback. functionPtr Function to call when entering targetState.
- Returns
- true if callback was registered, false for nullptr, duplicate, or full callback buffer.
Definition at line 9 of file BaseStateMachine.cpp.
◆ update()
|
pure virtual |
Advance the state machine with the latest measurements.
- Parameters
-
accel Acceleration vector readings. alt Altimeter sample.
- Note
- When to use: call every sensor update; return codes can signal events or errors.
Implemented in BurnoutStateMachine, and StateMachine.
Member Data Documentation
◆ kMaxStateEntryCallbacks
|
staticconstexpr |
Definition at line 24 of file BaseStateMachine.h.
The documentation for this class was generated from the following files: